渔场里这俩新成员不“一般”!

国家数字渔业创新中心(以下简称“国渔中心”)的实验室里,刘金存和学生正站在养殖缸前,注视着两条“鱼”游的正欢。与传统的鱼不同,两条“鱼”通体黑色,充满着金属质感。
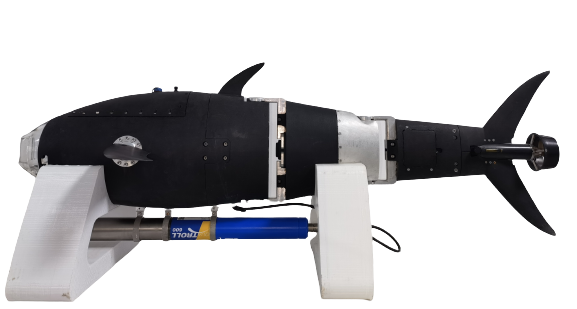
仿生机器鱼
“这就是我们研制的机器金枪鱼和机器海豚,它们代表了不同的游动特点,其核心就是一个目的,实现机器鱼养鱼”,刘金存表示。
刘金存是信电学院人工智能系副教授,也是国渔中心李道亮教授团队下属水下仿生机器人团队的一员。说起团队的工作,已经在团队工作20余年的位耀光教授一语中的,“就是让渔民的工作没那么辛苦。”
位耀光曾经看过渔民养殖海产,一个网箱的直径400米,潜水员巡查一遍需要耗费3-4天的时间,不仅耗时,雇佣专业的潜水员成本也很高,为解决这个问题,团队选择了水下机器人这个思路,将传感器装在机器上探查鱼情和围网。
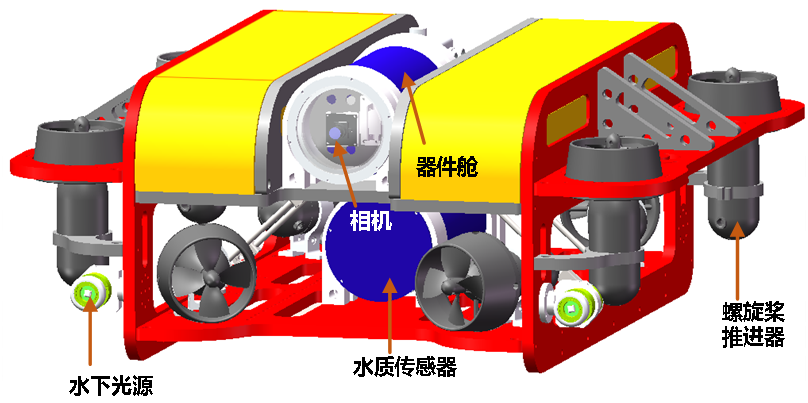
框架式机器人
团队第一款水下机器人只需要最多4小时就可以把400米的网箱巡查一遍,团队很快遇到了第一个问题——鱼的感受。刘金存还记得自己带着学生去渔场的经历,“鱼很容易应激,如果我们人离鱼非常近,鱼就往起蹦。”于是,在传统的框架式机器人之外,团队研发了仿生机器鱼,体积较小,外形近似鱼类,更容易融入生物环境,不会对水域环境及水生动物产生较大干扰,代表性产品就是机器金枪鱼。
人工智能系主任安冬教授表示:“我们的机器鱼在游动的时候,很多鱼自发的会跟着它们走,形成一个大鱼带小鱼的过程。”
另一个障碍很快出现,机器金枪鱼的尾部左右摆动,受运动力学和技术的限制,鱼的头部会来回摆动,这对于探查水下的网箱和鱼情是一个非常大的挑战。为此,团队开展科技攻关,给机器鱼研发了一套视觉增稳系统,同时借助视觉检测的手段,使机器鱼看的“更稳”、“更清晰”。

团队成员在海上渔场准备测试机器鱼
团队的目标并不止于此,他们还研发了仿生机器鲤鱼,通过柔性的仿肌腱驱动,能够最大限度的模拟鱼类在游动时的肌肉变化;研发了仿生机器海豚,模拟海豚上下拍动的游动姿态,更能适合不同养殖深度的监测;研发了仿生机器蝠鲼,可在水草、珊瑚丛生的复杂环境下完成对底栖养殖生物的细微观察。这些都为团队未来开发出来更多的仿生鱼奠定了基础。

师生在海上渔场测试仿生机器鱼
别小看仿生机器鱼,这里结合了非常多的前沿技术,包括传统推进和仿鱼柔性双驱动技术,实现了低扰动仿鱼巡游与传统驱动的抗扰纠偏,同时也搭载了多种高精度传感设备,可以实时监测水质信息和鱼类的行为等。
在团队的努力下,水下机器鱼也搭上了人工智能的快车。团队研究开发自主运动控制算法,并进行了轻量化处理,部署在小型人工智能芯片上,置于机器鱼体内,实现了机器鱼在水下多场景自主分析、自适应游动、自主检测。机器鱼插上了智慧的翅膀。
在传统的方式中,生物量估算,需要靠人工打捞出来再进行计算和称量。安冬表示,团队通过收集大量鱼类行为,鱼类大小、数量、活跃状态等生物指标数据,用算法建立了鱼类生物指标数据与鱼类生物量的关系。这套算法搭配机器鱼上传感器实时采集到的水质传感器和视频信息,可以根据计算出的鱼类的数量和大小来按需投喂,进一步减少养殖成本,实现数字渔业的智能化管理,提高养殖作业的工作效率。为此,团队积累了十几种鱼类的视频图像数据200多TB、1000余万份量级的照片与视频材料。
团队也将上述研发的智能水产养殖装备与国渔中心研发的范蠡大模型相结合,相关技术在山东、天津等23个省市累计推广陆基工厂养殖 630 万平方米,设施池塘养殖及近海养殖825万亩,节约劳动力成本50%以上。
范蠡大模型是国渔中心2024年发布的国内首个渔业大模型,模型可以实现渔业多模态数据采集、清洗、萃取和整合等,可以为渔业养殖工人管理经营者和政府决策部门提供全面精准的智能化支撑。

师生在海上渔场进行实验
谈起未来,国渔中心主任、信电学院教授李道亮表示:“人工智能在智慧渔业中的应用是多元化且深远的”。水下仿生机器人团队也将在李道亮的带领下不断探索水下机器人的前沿领域。